
0 引言
隨著汽車等各種車輛交通工具的普及,車輛導航設備的需求也變得日益旺盛。作為車載設備.不僅要有可靠的性能,而且需要具有便攜、低功耗和低價格等特點。而采用基于ARM微處理器的嵌入式系統與GPS模塊相配合的GPS導航終端機的設計方案,可以很好的滿足這一系統需求。為此,本文介紹了一種利用ARM9開發板和GPS模塊實現GPS導航功能的終端機的軟硬件結構和設計方法。
1 GPS導航系統結構
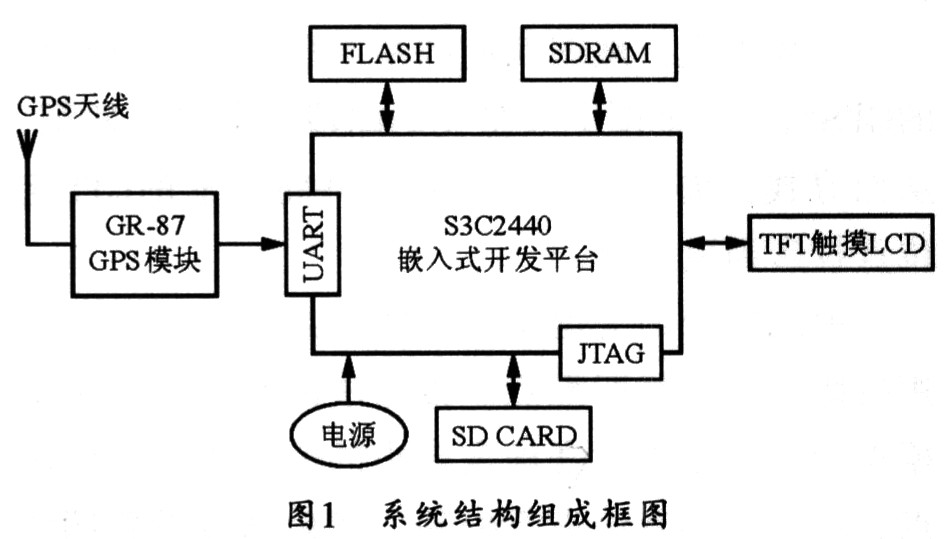
本文所介紹的GPS全球定位導航系統按功能可分為嵌入式主控模塊、GPS模塊、顯示模塊、擴展模塊及供電模塊等五大部分。
嵌入式主控模塊基于S3C2440處理器,主要負責對GPS導航模塊數據的響應、處理和控制。在硬件上,主控模塊就是一個嵌入式開發板,包括觸摸LCD接口電路、SD卡接口電路、FLASH、SDRAM等。而在軟件上,主控模塊上應當運行嵌入式Linux系統。而嵌入式Linux操作系統的主要作用是管理程序模塊進程并調度進程等。
GPS模塊主要用于接收導航衛星數據,并以特定的格式發送給主控模塊。顯示模塊可選用3.5寸TFT帶觸摸屏LCD,主要用于與用戶進行交互。擴展模塊主要指的是SD卡。供電模塊主要為系統正常工作提供電源。圖1所示是該系統的結構圖。
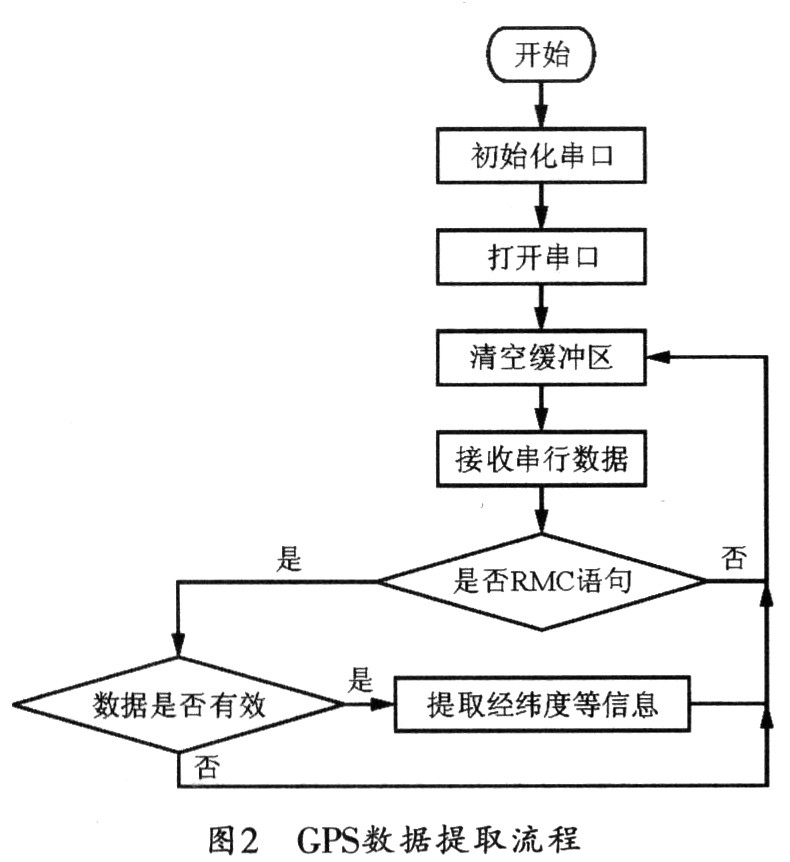
2 GPS數據的提取
GR-87型GPS模塊的輸出語句遵循NMEA-0183標準。該標準的語句都是以“$”開始,以
3 導航地圖的實現
在獲得了經緯度等定位信息之后,還需要將它們直觀的顯示在電子地圖或其它顯示媒體上,這樣才能真正起到導航的作用。要想將其準確的顯示在電子地圖上,就需要用一定的算法進行轉化,即地圖匹配算法。
一般來說,地圖匹配的基本思路是通過車輛的GPS軌跡與地圖上矢量化的路段對象進行匹配,從而尋找當前所行進的道路,并將當前的GPS定位點投影到道路上。
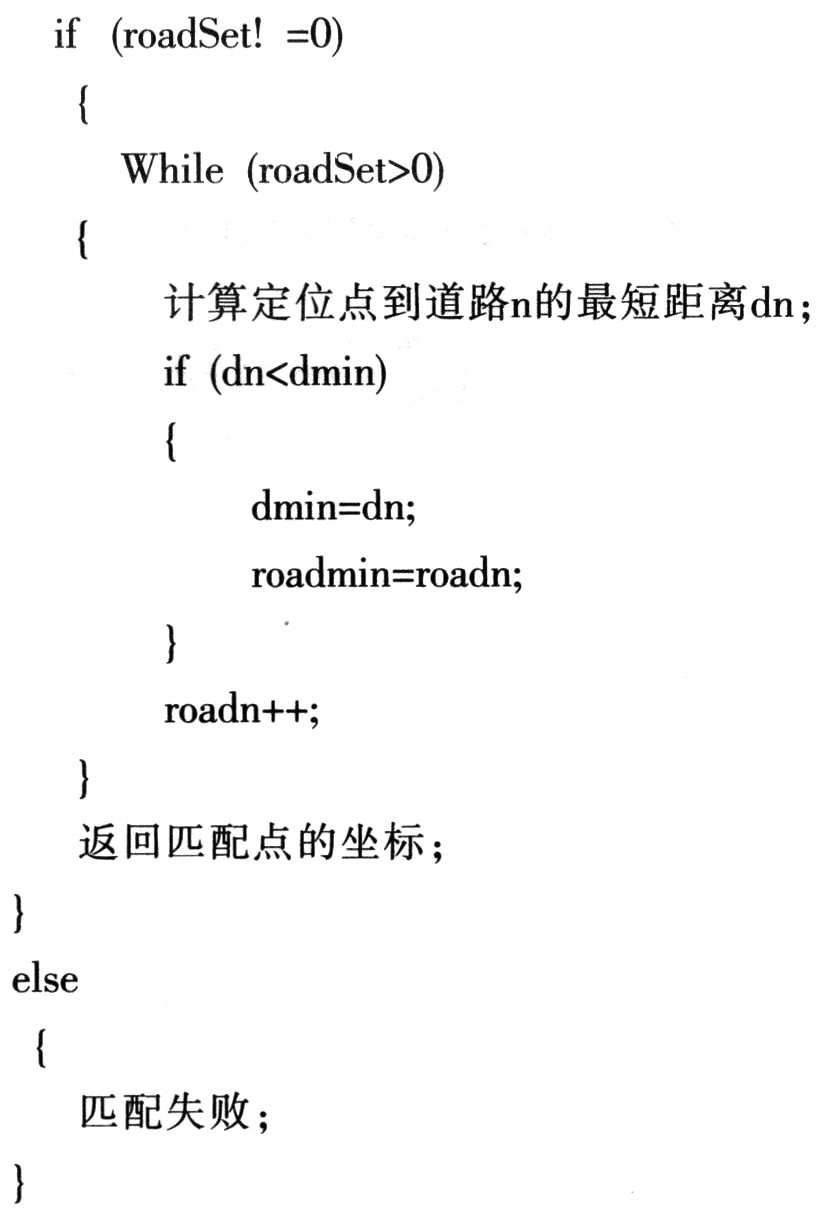
地圖匹配的關鍵是確定匹配點,設計時可以用投影法來尋找匹配點。投影法的基本思路是依據點到直線的距離來確定最小的值為投影的匹配點,并用最鄰近法進行處理,然后通過設置閾值來濾掉錯誤匹配點,得到初步結果,從而完成點到線的匹配。
具體的實現方法是先預處理道路層,再將道路轉換為折線段,找到當前道路,然后把當前定位點投影到道路上,再找到離定位點最近的公路圖層中的一條線段,之后再計算得到點到線上距離最短的點,最后查找各層中在誤差范圍之內的道路。
其算法的基本流程代碼如下:
導航地圖的實現可以采用嵌入式圖形界面工具Qt embedded來實現。該圖形界面為人機交互界面,用戶可以通過屏幕來了解導航信息,也可以直接操作觸摸屏來操作系統,如地圖的縮放、查看定位信息等。
4 結束語
由于ARM處理器具有低功耗、高性能等特點,因此可以廣泛用于各種便攜式電子產品中。本設計在現有的電子產品基礎上,通過外接GPS模塊來擴展GPS導航功能,可為用戶在節省費用的同時又不損失太多的便攜性。為此,作者希望使用ARM開發板和GPS模塊相結合來實現GPS導航功能的方法,可以為智能設備擴展GPS功能提供一個參考。